
Frank está jugando a la pelota con su perro llamado Roko. Cuando Frank lanza la pelota, su mano está a una altura inicial de 1.25 metros, y lanza la pelota en un ángulo de 64º con respecto al suelo. La pelota vuela por el aire con una velocidad inicial de 6 m/s, y el perro Roko está decidido a atrapar la pelota pero quiere hacer el menor esfuerzo posible. (Roko es muy flojo). Si Roko puede saltar hasta una altura máxima de 0.12 metros, ¿cuál es la distancia mínima que debe correr para atrapar la pelota? (Suponga que Roko y la pelota están en la misma posición X cuando Frank lanza inicialmente la pelota).
Encuentre el tiempo para llegar a una altura específica dada la posición inicial y final y la velocidad inicial. Luego, use el tiempo para encontrar la distancia horizontal con la ecuación para un movimiento con rapidez constante.
Con la velocidad inicial dada, podemos escribir el componente horizontal \(v_x\) como:
\begin{equation*}
v_x = v \cos \theta,
\end{equation*}
y la velocidad inicial en Y como:
\begin{equation*}
v_{i_y} = v \sin \theta.
\end{equation*}
Entonces, la distancia horizontal se puede expresar como:
\begin{equation*}
\vec{x}_b= v_x t \hat{\textbf{i}} = (v \cos \theta) t \, \hat{\textbf{i}}.
\end{equation*}
Con la ecuación de movimiento en la dirección vertical, es posible encontrar el tiempo \(t\):
\begin{equation*}
y_f \, \hat{\textbf{j}} = – \frac{1}{2} g t^2 \, \hat{\textbf{j}} + v_{i_y}t \, \hat{\textbf{j}} + y_i \, \hat{\textbf{j}},
\end{equation*}
donde las posiciones inicial y final son valores conocidos y \(t\) es el único valor desconocido. Despejando \(t\), obtenemos:
\begin{equation*}
t = -0.18 \, \text{s},
\end{equation*}
y
\begin{equation*}
t = 1.28 \, \text{s}.
\end{equation*}
Ahora, usando el tiempo positivo en la ecuación de movimiento en la distancia horizontal, obtenemos:
\begin{equation*}
\vec{x}_b= 3.37 \, \text{m} \, \hat{\textbf{i}}.
\end{equation*}
Para obtener una explicación más detallada de cualquiera de estos pasos, haga clic en “Solución detallada”.
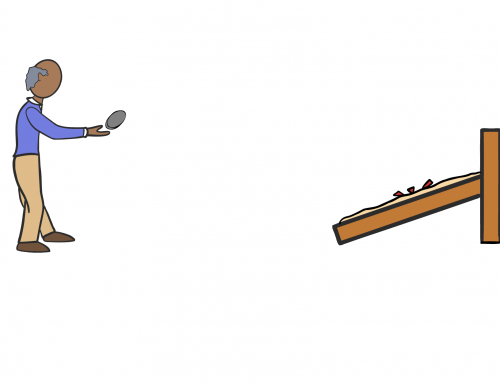
Para atrapar la pelota, Roko tiene que correr cierta distancia y luego saltar. Tenga en cuenta que, dado que Roko no salta muy alto (solo 0.12 metros), no podrá atrapar la pelota en ningún momento mientras la pelota siga subiendo; por lo tanto, tendrá que esperar a que baje la pelota. Por supuesto, hay varios lugares donde Roko podría atrapar la pelota mientras baja. Por ejemplo, podría simplemente correr todo el camino hasta que llegue al punto donde la pelota toca el suelo. O podría atraparlo cuando la pelota esté a solo 1 centímetro del suelo. O a 5 centímetros del suelo y así sucesivamente. Sin embargo, nos piden que encontremos la mínima distancia a la que Roko podría atrapar la pelota. Esto significa que queremos encontrar la distancia a la que la pelota ha caído lo suficiente para que Roko la alcance saltando, como se muestra en la figura 1.
Figura 1: Tres momentos diferentes en los que Roko pudo atrapar la pelota. En los de la izquierda y el centro, Rocko atrapa la pelota en el aire, mientras que en el de la derecha, Roko atrapa la pelota en el suelo. De estas tres opciones, la de la izquierda muestra la distancia horizontal mínima para la captura.
En el momento de la captura, la posición de Roko tiene que ser exactamente la misma que la posición de la pelota. Entonces, para resolver este problema, necesitaremos tener en cuenta las ecuaciones de movimiento tanto de la pelota como de Roko y luego usar el hecho de que sus posiciones finales coinciden.
Comencemos colocando un sistema de coordenadas exactamente en la posición inicial de Roko, con el eje Y apuntando hacia arriba y el eje X apuntando hacia la derecha.
Figura 2: Colocamos el sistema de coordenadas en el suelo frente a la posición inicial de Roko.
Como dijimos anteriormente, para que Roko atrape la pelota, su posición X y su posición Y deben ser las mismas que las posiciones X y Y de la pelota. Esto significa que
\begin{equation}
\label{Dog_vectoresX}
\vec{x}_R=\vec{x}_b,
\end{equation}
y
\begin{equation}
\label{Dog_vectoresY}
\vec{y}_R=\vec{y}_b,
\end{equation}
donde el subíndice ‘R’ se refiere a Roko y ‘b’ a la pelota.
La distancia mínima que debe correr Roko vendrá dada por la X mínima para la cual la ecuación \eqref{Dog_vectoresX} es válida. Por lo tanto, una buena forma de proceder es observar que, a lo largo de X, la pelota sigue un movimiento con rapidez uniforme (esto siempre es cierto para un proyectil), por lo que la posición de la pelota a lo largo de X viene dada por
\begin{equation}
\label{Dog_velX}
\vec{x}_b= v_x t \, \hat{\textbf{i}},
\end{equation}
donde \(v_x\) es la magnitud de la velocidad a lo largo de X. Podemos encontrar fácilmente esta rapidez a partir de la rapidez y el ángulo iniciales. En particular, considere la figura 3.
Figura 3: Se muestra la rapidez inicial de la pelota \(v_i \), así como sus componentes a lo largo de los ejes X y Y. También se muestra el ángulo \(\theta \) entre la dirección de la velocidad y la línea horizontal.
A partir de aquí, está claro que
\begin{equation}
v_x = v \cos \theta.
\end{equation}
Por tanto, la ecuación \eqref{Dog_velX} se convierte en
\begin{equation}
\label{Dog_xvcosthetat}
\vec{x}_b= (v \cos \theta) t \, \hat{\textbf{i}}.
\end{equation}
Ahora, todavía necesitamos encontrar el tiempo \(t\) para usarlo en esta ecuación. Para hacer esto, consideremos lo que sucede a lo largo de Y. En Y, la pelota tiene una aceleración constante, por lo que su ecuación de movimiento es
\begin{equation}
\label{Dog_yf}
y_f \, \hat{\textbf{j}} = – \frac{1}{2} g t^2 \, \hat{\textbf{j}} + v_{i_y}t \, \hat{\textbf{j}} + y_i \, \hat{\textbf{j}},
\end{equation}
donde usamos el hecho de que según nuestro sistema, la posición inicial en Y es positiva (y lo sabemos), la rapidez inicial Y también es positiva y la aceleración gravitacional es negativa. Usemos la figura con la velocidad inicial nuevamente para escribir una expresión para la rapidez inicial en Y. De esa figura, vemos que
\begin{equation}
\label{Dog_velY}
v_y = v_i \sin \theta.
\end{equation}
Usemos esto en la ecuación \eqref{Dog_yf} . Luego,
\begin{equation}
\label{Dog_yf2}
y_f \, \hat{\textbf{j}} = – \frac{1}{2} g t^2 \, \hat{\textbf{j}} + (v_i \sin \theta)t \, \hat{\textbf{j}} + y_i \, \hat{\textbf{j}}.
\end{equation}
Recuerda que necesitamos encontrar el momento en el que Roko atrapa la pelota para usarlo en la ecuación \eqref{Dog_xvcosthetat} . como la ecuación \eqref{Dog_vectoresY} dice, cuando Roko atrapa la pelota, su posición en Y es la misma que la posición de la pelota en Y.Como explicamos antes, nos importa la posición Y correspondiente a la distancia mínima, que es la posición donde Roko salta tan alto como puede para atraparla. Por tanto, podemos escribir la ecuación anterior como
\begin{equation}
(0.12 \, \text{m}) \, \hat{\textbf{j}} = – \frac{1}{2} g t^2 \, \hat{\textbf{j}} + (v_i \sin \theta) t \, \hat{\textbf{j}} + y_i \, \hat{\textbf{j}}.
\end{equation}
Insertemos los valores para el ángulo, la rapidez inicial y la posición inicial y solo enfoquemonos en las magnitudes para obtener
\begin{equation}
0.12 \, \text{m} = – \frac{1}{2} (9.8 \text{m/s}^2) t^2 + (6 \, \text{m/s}) \sin (64^\circ)t + (1.25 \, \text{m}).
\end{equation}
Si movemos todos los términos al lado izquierdo, obtenemos
\begin{equation}
\frac{1}{2} (9.8 \text{m/s}^2) t^2 – (6 \, \text{m/s}) \sin (64^\circ)t – (1.13 \, \text{m}) = 0,
\end{equation}
que reconocemos como una ecuación cuadrática de la forma \(ax^2 + bx + c\) (y donde la variable desconocida es \(t\) en nuestro caso). Aquí \(a\) corresponde a \(\frac{1}{2} (9.8 \text{m/s}^2) \), \(b\) a \( (6 \, \text{m/s}) \sin (64^\circ) \) y \(c\) a \(-1.13 \, \text{m} \). La ecuación nos da dos soluciones,
\begin{equation}
t = -0.18 \, \text{s},
\end{equation}
y
\begin{equation}
t = 1.28 \, \text{s}.
\end{equation}
Por supuesto, el valor que queremos es el positivo para el tiempo (el valor negativo correspondería a los momentos previos al lanzamiento de la pelota). Entonces podemos usar este tiempo en la ecuación \eqref{Dog_xvcosthetat} para obtener
\begin{equation}
\vec{x}_b= v_i \cos \theta (1.28 \, \text{s}) \, \hat{\textbf{i}}.
\end{equation}
Luego, insertemos los valores para la rapidez inicial y el ángulo
\begin{equation}
\vec{x}_b= (6 \, \text{m/s}) \cos (64^\circ) (1.28 \, \text{s}) \, \hat{\textbf{i}},
\end{equation}
para obtener
\begin{equation}
\vec{x}_b= 3.37 \, \text{m} \, \hat{\textbf{i}}.
\end{equation}
Ésta es la posición mínima a lo largo de X en la que Roko necesita saltar para atrapar la pelota. La distancia es solo la magnitud, es decir, \(3,37 \) metros.
You need to be registered and logged in to take this quiz. Log in
Leave A Comment