
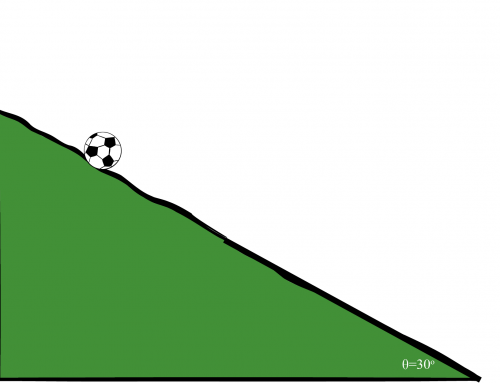
Una bola sólida de radio \(a = 5 \, \text{cm}\) y masa \(m = 100 \, \text{g}\) está en el punto más alto de un hemisferio de radio \(R = 60 \, \text{cm} \), como se muestra en la figura. La bola sólida y el hemisferio tienen un coeficiente de fricción estático \(\mu_e = 0.6 \). La bola se saca del equilibrio y comienza a rodar sin deslizarse.
a) Encuentre la rapidez del centro de la esfera en función del ángulo \(\theta\).
b) Determine el ángulo crítico \(\theta_c \) donde la pelota se desprende del hemisferio.
a) Aplicar conservación de energía. Considere la energía cinética rotacional, basada en su momento de inercia, y su energía potencial que depende del ángulo.
b) Encuentre la aceleración centrípeta dada la velocidad encontrada en la parte (a), y luego aplique la Segunda Ley de Newton al caso en que la pelota pierde contacto. Usa la aceleración encontrada anteriormente para despejar el ángulo.
a) La conservación de la energía establece:
\begin{equation*}
E_A= E_B,
\end{equation*}
[mepr-show rules=”4409″ unauth=”both”]
donde en \( A \), la esfera es estática y en \( B \), la esfera perderá contacto. En este caso, la conservación de energía se puede escribir como:
\begin{equation*}
mg(R+a)=mg(R+a)\cos(\theta)+\frac{1}{2}mv_B^2+\frac{1}{2}I\omega^2.
\end{equation*}
El momento de inercia de la esfera es \(I = \frac{2}{5} ma^2\) y \(omega = \frac{v_B}{a}\). Sustituyendo estas variables en la última ecuación y despejando \( v_B \), obtenemos:
\begin{equation*}
v_B=\sqrt{\frac{10}{7}g(R+a)(1-\cos(\theta))}.
\end{equation*}
b) Para el ángulo crítico, tenga en cuenta que la aceleración centrípeta es:
\begin{equation*}
a_c = \frac{v_{cm}^2}{(R+a)},
\end{equation*}
donde \( v_{cm} \) es la velocidad calculada en el inciso ( a). Basado en la segunda ley de Newton en la dirección \({y-} \), y girando el eje para alinearlo con el movimiento de la pelota, podemos escribir la ecuación de movimiento para el caso en que la pelota casi pierde contacto:
\begin{equation*}
N – mg \cos \theta = -ma_c,
\end{equation*}
donde podemos exigir \( N = 0 \) como requisito previo para que la pelota pierda contacto con el hemisferio. Este se convierte en el ángulo crítico, entonces \( \theta = \theta_c \). Sustituyendo la aceleración centrípeta y \( \cos theta_c \) con algo de álgebra, obtenemos:
\begin{equation*}
\cos \theta = \frac{10}{17},
\end{equation*}
Despejando \( \theta_c \) con la función arco-coseno, el resultado se da como:
\begin{equation*}
\theta_c \approx 54^\circ.
\end{equation*}
Para obtener una explicación más detallada de cualquiera de estos pasos, haga clic en “Solución detallada”.
[/mepr-show]
a) Necesitamos encontrar la rapidez de la esfera en función del ángulo \(\theta\). Como la bola rueda sin resbalar, la fuerza de fricción no realiza ningún trabajo y se conserva la energía mecánica \(E\). La energía mecánica \(E\) es la suma de la energía potencial \(U\), asociada con las fuerzas conservadoras, y la energía cinética \(K\); es decir,
\begin{equation}
\label{emec}
E=U+K.
\end{equation}
[mepr-show rules=”4409″ unauth=”both”]
Cuando un cuerpo rígido realiza un movimiento de traslación y rotación, la energía cinética viene dada por la energía cinética de traslación del centro de masa \(K_{\text{cm}}\) más la energía cinética de rotación \(K_{\text{rot}}\); explícitamente,
\begin{equation}
K=K_{\text{cm}}+K_{\text{rot}}.
\end{equation}
La expresión explícita de la energía cinética de traslación del centro de masa está dada por
\begin{equation}
\label{ktr}
K_{\text{cm}}=\frac{1}{2}m v_{\text{cm}}^2,
\end{equation}
donde \(m\) es la masa del cuerpo y \(v_{\text{cm}}\) es la rapidez de su centro de masa. La expresión para la energía cinética rotacional es
\begin{equation}
\label{krot}
K_{\text{rot}}=\frac{1}{2}I\omega^2,
\end{equation}
donde \(I\) es el momento de inercia alrededor del centro de masa y \(\omega\) es la rapidez angular. La única fuerza conservadora que se ejerce sobre la pelota es la fuerza gravitacional, cuya energía potencial está dada por
\begin{equation}
\label{mgh}
U=mgh,
\end{equation}
donde \(g\) es la constante gravitacional y \(h\) es la altura medida desde un sistema de coordenadas dado. En nuestro caso, el sistema de coordenadas se coloca en el centro del hemisferio, como se ve en la figura 1.

Figura 1: Colocamos el sistema de coordenadas en el centro del hemisferio. Se muestran el radio del hemisferio \(R\) y la esfera \(a\), así como su relación con el ángulo \(\theta\), que describe la posición de la esfera sobre el hemisferio. En el punto A, la esfera es estática, mientras que en el punto B ha ganado cierta rapidez angular \(\omega\) así como una rapidez tangencial del centro de masa \(v_{cm}\).
Entonces podemos escribir la energía mecánica en cualquier punto de la trayectoria usando las ecuaciones \eqref{ktr} , \eqref{krot} y \eqref{mgh} en \eqref{emec} como
\begin{equation}
\label{emec2}
E=mgh+\frac{1}{2}mv_{\text{cm}}^2+\frac{1}{2}I\omega^2.
\end{equation}
Ahora calcularemos la energía mecánica en el punto A, ubicado en la parte superior del hemisferio, y la energía en el punto B, ubicado en un ángulo \(\theta\) del eje vertical como se ve en la figura anterior. La energía mecánica en el punto A \(E_A\) es solo potencial ya que la rapidez del centro de masa y la rapidez angular son cero. La altura \(h\) que debemos usar es la del centro de masa, que es \(R+a\). Entonces, usando la ecuación \eqref{emec2} , podemos escribir
\begin{equation}
\label{ea}
E_A=mg(R+a).
\end{equation}
En el punto B, la rapidez del centro de masa es \(v_B\) y la rapidez angular \(\omega\). La altura se puede calcular a partir de la geometría utilizando el triángulo definido por \(\theta\) con hipotenusa \(R+a\). En este caso \(h=(R+a)\cos(\theta)\). Luego, usando la ecuación \eqref{emec2} , podemos escribir una expresión para la energía mecánica en B; es decir,
\begin{equation}
\label{eb}
E_B=mg(R+a)\cos(\theta)+\frac{1}{2}mv_B^2+\frac{1}{2}I\omega^2.
\end{equation}
Como consecuencia de la condición de rodar sin resbalar, obtenemos la siguiente relación entre la rapidez angular y la rapidez del centro de masa:
\begin{equation}
\label{omega}
\omega=\frac{v_B}{a}.
\end{equation}
Usando esta relación y el valor del momento de inercia de una esfera sólida de masa \(m\) y radio \(a\), es decir \(I=\frac{2}{5}ma^2\), obtenemos
\begin{equation}
\label{eb2}
E_B=mg(R+a)\cos(\theta)+\frac{1}{2}mv_B^2+\frac{1}{2}\left( \frac{2}{5}ma^2\right)\left(\frac{v_B}{a}\right)^2,
\end{equation}
que después de algunas simplificaciones es
\begin{equation}
\label{eb3}
E_B=mg(R+a)\cos(\theta)+\frac{1}{2}mv_B^2+\frac{1}{5}mv_B^2,
\end{equation}
o equivalentemente, haciendo la suma de los dos últimos términos en el lado derecho
\begin{equation}
\label{eb4}
E_B=mg(R+a)\cos(\theta)+\frac{7}{10}mv_B^2.
\end{equation}
Aplicando el principio de conservación de la energía a los puntos A y B, podemos escribir
\begin{equation}
E_A=E_B,
\end{equation}
que, después de usar las expresiones explícitas para las energías en A y B dadas por las ecuaciones \eqref{ea} y \eqref{eb4} , respectivamente, se convierte en
\begin{equation}
mg(R+a)=mg(R+a)\cos(\theta)+\frac{7}{10}mv_B^2.
\end{equation}
Podemos cancelar la masa \(m\) en la ecuación anterior y resolver \(v_B\) para obtener
\begin{equation}
g(R+a)-g(R+a)\cos(\theta)=\frac{7}{10}v_B^2,
\end{equation}
\begin{equation}
g(R+a)(1-\cos(\theta))=\frac{7}{10}v_B^2,
\end{equation}
\begin{equation}
\label{result2}
\frac{10}{7}g(R+a)(1-\cos(\theta))=v_B^2.
\end{equation}
Tomando la raíz cuadrada en ambos lados de la expresión anterior, finalmente podemos obtener una expresión para la rapidez \(v_B\) en términos del ángulo \(\theta\); explícitamente,
\begin{equation}
\label{result}
v_B=\sqrt{\frac{10}{7}g(R+a)(1-\cos(\theta))}.
\end{equation}
b) Para determinar el ángulo crítico en el que la bola se desprende del hemisferio, debemos hacer un diagrama de cuerpo libre de la esfera en un ángulo arbitrario \(\theta\) y luego exigir que la fuerza de contacto \(\vec{N}\) es cero para obtener una expresión para \(\theta_c\). Primero, dibujemos el diagrama de cuerpo libre , como el que se muestra en la figura 2.

Figura 2: diagrama de cuerpo libre de la pelota. El sistema de coordenadas se coloca ahora en el centro de la pequeña esfera de manera que el eje Y es perpendicular a la superficie del hemisferio y el eje X es tangente a la superficie del hemisferio. Se muestran las tres fuerzas ejercidas sobre la esfera: la fuerza de contacto \(\vec{N}\), la fricción \(\vec{f}_r\) y el peso \(\vec{W}\).
Observe que el sistema de coordenadas es tal que el eje X es tangente al hemisferio y el eje Y es perpendicular a él. Ahora, usamos la segunda ley de Newton
\begin{equation}
\label{newton}
\sum\vec{F}=m\vec{a},
\end{equation}
donde \(\vec{a}\) es el vector de aceleración y \(\sum \vec{F}\) es la suma de todas las fuerzas ejercidas sobre la pelota. El vector de aceleración se puede dividir en la aceleración tangencial \(a_t\), que es tangente al hemisferio, y la aceleración centrípeta \(a_c\), que se dirige hacia el centro del hemisferio, es decir, en el eje Y negativo . Entonces podemos escribir
\begin{equation}
\label{acel}
\vec{a}=a_t\,\hat{\textbf{i}}-a_c\,\hat{\textbf{j}}.
\end{equation}
En términos de las fuerzas, solo hay tres fuerzas ejercidas sobre la esfera: la fricción \(\vec{f}_r\), la fuerza de contacto normal a la superficie \(\vec{N}\) y el peso \(\vec{W}\). De acuerdo con las direcciones que se muestran en la figura anterior, podemos escribir
\begin{equation}
\label{fr}
\vec{f}_r=f_r\,\hat{\textbf{i}},
\end{equation}
donde \(f_r\) es la magnitud de la fuerza de fricción. Para la fuerza de contacto
\begin{equation}
\label{normal}
\vec{N}=N\,\hat{\textbf{j}},
\end{equation}
donde \(N\) es su magnitud. Para el peso, su magnitud es \(mg\), entonces en términos del ángulo \(\theta\) tenemos
\begin{equation}
\label{wei}
\vec{W}=mg\sin(\theta)\,\hat{\textbf{i}}-mg\cos(\theta)\,\hat{\textbf{j}}.
\end{equation}
Usando las expresiones para las fuerzas y la aceleración dadas por las ecuaciones \eqref{acel} , \eqref{fr} , \eqref{normal} y \eqref{wei} en la ecuación \eqref{newton} , obtenemos
\begin{equation}
\label{newton2}
fr\,\hat{\textbf{i}}+N\,\hat{\textbf{j}}+mg\sin(\theta)\,\hat{\textbf{i}}-mg\cos(\theta)\,\hat{\textbf{j}}=m(a_t\,\hat{\textbf{i}}-a_c\,\hat{\textbf{j>.
\end{equation}
La ecuación anterior es una ecuación vectorial, por lo que debe ser verdadera por componentes. Coincidir con los términos en la dirección \(\hat{\textbf{j}}\) en el lado izquierdo y derecho de la ecuación \eqref{newton2} , obtenemos (omitiendo la notación vectorial)
\begin{equation}
\label{newton3}
N-mg\cos(\theta)=-ma_c.
\end{equation}
La aceleración centrípeta \(a_c\) se puede dar en términos de la rapidez del centro de masa y la distancia desde el centro del hemisferio al centro de masa; a saber,
\begin{equation}
a_c=\frac{v_{\text{cm}}^2}{(R+a)}.
\end{equation}
Podemos usar nuestro resultado para la rapidez del centro de masa dado en la ecuación \eqref{result2} en la ecuación anterior para obtener
\begin{equation}
a_c=\frac{\frac{10}{7}g(R+a)(1-\cos(\theta))}{(R+a)},
\end{equation}
que después de la simplificación es
\begin{equation}
a_c=\frac{10}{7}g(1-\cos(\theta)).
\end{equation}
Usando la expresión para la aceleración centrípeta dada arriba en la ecuación \eqref{newton3} , obtenemos
\begin{equation}
N-mg\cos(\theta)=-m\frac{10}{7}g(1-\cos(\theta)).
\end{equation}
Si exigimos que \(N=0\), lo que significa que la pelota pierde contacto con el hemisferio, entonces \(\theta=\theta_c\); explícitamente,
\begin{equation}
-mg\cos(\theta_c)=-m\frac{10}{7}g(1-\cos(\theta_c)),
\end{equation}
donde podemos cancelar la masa \(m\), la aceleración gravitacional \(g\) y el signo menos
\begin{equation}
\cos(\theta_c)=\frac{10}{7}(1-\cos(\theta)).
\end{equation}
Resolviendo \(\cos(\theta)\) de la ecuación anterior, obtenemos
\begin{equation}
\cos(\theta_c)+\frac{10}{7}\cos(\theta_c)=\frac{10}{7},
\end{equation}
\begin{equation}
\frac{17}{7}\cos(\theta_c)=\frac{10}{7},
\end{equation}
o, de manera equivalente
\begin{equation}
\cos(\theta_c)=\frac{10}{17}.
\end{equation}
Tomando la función trigonométrica inversa, podemos resolver para \(\theta_c\)
\begin{equation}
\theta_c=\arccos\left(\frac{10}{17}\right),
\end{equation}
\begin{equation}
\theta_c\approx 54^{\circ}.
\end{equation}
[/mepr-show]
You need to be registered and logged in to take this quiz. Log in

Leave A Comment