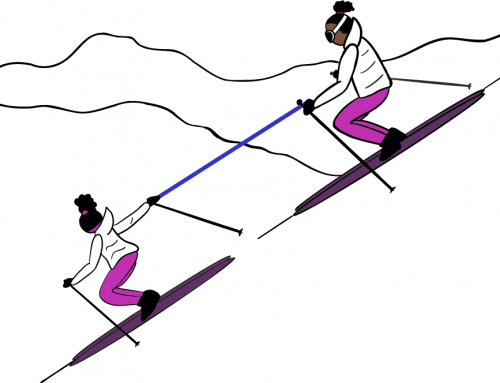
 Un desafortunado miembro de la tripulación se ha caído por el costado del barco y el capitán está tratando de tirar de ellos con una cuerda ideal. Las olas del océano continúan sacudiendo el barco y la proa del barco se inclina en un ángulo de 10º. La capitana agradece a su estrella de la suerte que sus zapatos tengan suelas reforzadas que deben proporcionar suficiente tracción para evitar resbalarse del barco. Si la masa del capitán es de 55 kg y la masa del marinero es de 70 kg, ¿cuál debe ser el coeficiente de fricción estática entre la cubierta y los zapatos del capitán justo antes de que comience a deslizarse? Suponga que cualquier fricción entre la cuerda y las asas del barco es insignificante.
Un desafortunado miembro de la tripulación se ha caído por el costado del barco y el capitán está tratando de tirar de ellos con una cuerda ideal. Las olas del océano continúan sacudiendo el barco y la proa del barco se inclina en un ángulo de 10º. La capitana agradece a su estrella de la suerte que sus zapatos tengan suelas reforzadas que deben proporcionar suficiente tracción para evitar resbalarse del barco. Si la masa del capitán es de 55 kg y la masa del marinero es de 70 kg, ¿cuál debe ser el coeficiente de fricción estática entre la cubierta y los zapatos del capitán justo antes de que comience a deslizarse? Suponga que cualquier fricción entre la cuerda y las asas del barco es insignificante.
Dibuje un diagrama de cuerpo libre; el diagrama de cuerpo libre tendrá una fuerza normal diagonal, una fuerza diagonal debida a la fricción y una fuerza de tensión horizontal. Tenga cuidado con el ángulo. Puede considerar rotar los ejes de coordenadas.
Para el marinero, la Segunda Ley de Newton es:
\begin{equation*}
T = m_s g.
\end{equation*}
[mepr-show rules=”4409″ unauth=”both”]
Segunda ley de Newton en la \({x-} \) la dirección del capitán es:
\begin{equation*}
T – fr_{max} \cos \theta – N \sin \theta = 0,
\end{equation*}
where \(fr_{max}=\mu N\). Reemplazando la tensión \( T \), y luego despejando \( N \) obtenemos:
\begin{equation*}
N = \frac{m_s g}{\mu \cos \theta + \sin \theta}.
\end{equation*}
Segunda ley de Newton en la \({y-} \) la dirección del capitán es:
\begin{equation*}
N \cos \theta – fr_{max} \sin \theta – m_c g = 0.
\end{equation*}
Reemplazando la fuerza normal \( N \) en la última ecuación, y rdespejando \( \mu \) con algo de álgebra, obtenemos:
\begin{equation*}
\mu = \frac{m_s \cos \theta – m_c \sin \theta}{m_c \cos \theta + m_s \sin \theta},
\end{equation*}
y con valores numéricos:
\begin{equation*}
\mu = 0.895.
\end{equation*}
Para obtener una explicación más detallada de cualquiera de estos pasos, haga clic en “Solución detallada”.
[/mepr-show]
Nos piden que encontremos el coeficiente de fricción estática entre los zapatos del capitán y el piso para el caso de que el capitán esté a punto de resbalar. Es conveniente comenzar con un diagrama de cuerpo libre para comprender mejor cómo relacionar el coeficiente en cuestión con las diferentes fuerzas.
Usemos un sistema de coordenadas donde el eje X es horizontal y el eje Y es vertical, como se ilustra en la figura 1.

Figura 1: Elegimos un sistema de coordenadas con el eje Y apuntando hacia arriba y el eje X positivo hacia la derecha.
[mepr-show rules=”4409″ unauth=”both”]
Entonces estudiemos las fuerzas sobre el capitán. Debido al peso del marinero, la cuerda ejercerá una tensión en la mano del capitán que apunta en el eje X positivo. A medida que el capitán usa su fuerza para sostener la cuerda, sus zapatos tenderán a deslizarse sobre el piso del barco. Por lo tanto, la superficie del barco ejercerá una fricción estática que evitará que los zapatos se deslicen. Dado que el piso no es perfectamente horizontal sino que tiene una pendiente, la fricción estática tendrá un componente X y un componente Y, como se ilustra en el siguiente diagrama. Finalmente, hay dos fuerzas más que actúan sobre el capitán, el peso, que apunta en la dirección Y negativa, y la fuerza normal, que es perpendicular al suelo. Nuevamente, dado que el piso no es perfectamente horizontal, esta fuerza normal tendrá una componente X y Y. Por lo tanto, el diagrama de cuerpo libre del capitán se puede ver en la figura 2.

Figura 2: diagrama de cuerpo libre para el capitán. Las fuerzas ejercidas sobre el capitán son: la fuerza de contacto con el piso \( N \), la tensión de la cuerda \( T \) y el peso \( W_c \).
También tenemos que estudiar las fuerzas sobre el marinero, ya que el marinero está afectando al capitán (por ejemplo, la tensión que ejerce la cuerda sobre la mano del capitán depende críticamente de la masa del marinero). El diagrama de cuerpo libre sobre el marinero es, afortunadamente, muy simple. Solo hay dos fuerzas, la tensión, apuntando hacia arriba (en la dirección Y positiva), y el peso, apuntando hacia abajo. Por lo tanto, el diagrama de cuerpo libre para el marinero se muestra en la figura 3.

Figura 3: diagrama de cuerpo libre para el marinero. Las fuerzas ejercidas sobre el marinero son la tensión en la cuerda \(T \) y el peso \(W \).
Ahora bien, en general, no existe una ecuación única para la fricción estática porque esta fuerza depende de las otras fuerzas externas que actúan sobre el objeto. Por ejemplo, cuanto mayor sea la masa del marinero, más fuerte tirará la cuerda de las manos del capitán, por lo que la fricción estática entre los zapatos y el piso debe ser mayor para que los zapatos no se deslicen. Pero para el caso en el que el objeto en cuestión está a punto de deslizarse (como este caso) la fricción estática debe ser máxima, y existe una ecuación conocida para su magnitud, a saber,
\begin{equation}
\label{RescueBoat_friccion}
fr_{max}=\mu N,
\end{equation}
donde \(\mu \) es el coeficiente de fricción estática y \(N \) es la magnitud de la fuerza normal que el piso ejerce sobre los zapatos del capitán. A partir de esta ecuación, queda claro que para encontrar el coeficiente de fricción estática entre los zapatos y el piso, necesitamos encontrar tanto la fuerza normal \(N \) como la fuerza de fricción \(fr_{max} \). Para encontrar esta última, escribamos la Segunda Ley de Newton para el capitán a lo largo de X, teniendo en cuenta el diagrama de cuerpo libre dibujado anteriormente. La tensión que ejerce la cuerda en las manos del capitán apunta en la dirección del eje X positivo, la fricción estática y la fuerza normal tienen una componente X que se opone a este movimiento a lo largo del eje X negativo. Entonces, en X, tenemos
\begin{equation}
\label{RescueBoat_fuerzasXCapitan}
T \, \hat{\textbf{i}} – fr_{{max}_x} \, \hat{\textbf{i}} – N_x \, \hat{\textbf{i}} = m a_x \, \hat{\textbf{i}},
\end{equation}
donde \(fr_ {{max} _x} \) y \(N_x \) son las componentes de la fuerza de fricción y la fuerza normal a lo largo de X, respectivamente. Ahora, para el caso en el que el capitán está a punto de deslizarse, la aceleración es cero (el capitán aún no se desliza), por lo que la ecuación anterior da como resultado
\begin{equation}
\label{RescueBoat_fuerzasXCapitanAcCero}
T \, \hat{\textbf{i}} – fr_{{max}_x} \, \hat{\textbf{i}} – N_x \, \hat{\textbf{i}} = 0 \, \hat{\textbf{i}}.
\end{equation}
Si nos enfocamos en las magnitudes y reorganizamos los términos, obtenemos
\begin{equation}
\label{RescueBoat_tension}
T = fr_{{max}_x} + N_x.
\end{equation}
Para usar esta ecuación con la ecuación \eqref{RescueBoat_friccion}, necesitamos encontrar la tensión, y también tenemos que relacionar \(fr_ {{max} _x} \) con \(fr_ {{max} } \). En el diagrama de cuerpo libre, se ve que
\begin{equation}
fr_{{max}_x}=fr_{{max}} \cos \theta,
\end{equation}
y tambien que
\begin{equation}
N_x=N \sin \theta,
\end{equation}
donde \(\theta \) es la pendiente del piso (que conocemos). Si usamos estos resultados en la ecuación \eqref{RescueBoat_tension} , entonces obtenemos
\begin{equation}
\label{RescueBoat_tensionDespejada}
T = {(fr_{{max}} \cos \theta)} + {(N \sin \theta)}.
\end{equation}
Recuerde que queremos encontrar \(fr_ {{max} } \) para usarla con la ecuación \eqref{RescueBoat_friccion}, por lo que ahora necesitamos encontrar la tensión. Para hacer eso, estudiemos las fuerzas sobre el marinero. Como indicamos en el diagrama de cuerpo libre, solo hay dos fuerzas sobre el marinero, la tensión que apunta hacia arriba y el peso que apunta en la dirección Y negativa. Entonces, la Segunda Ley de Newton da
\begin{equation}
T_y \, \hat{\textbf{j}} – W \, \hat{\textbf{j}} = m a_y \, \hat{\textbf{j}},
\end{equation}
donde \(T_y \) es la magnitud de la tensión sobre la mano del marinero y \(a_y \) la aceleración vertical. Pero observe que la cuerda es ideal y está estirada. Esto significa que la magnitud de la tensión producida por los dos extremos es la misma, y también que la magnitud de la aceleración de los dos objetos unidos a la cuerda es la misma (para una cuerda ideal que se estira, estas dos cosas son siempre ciertas). Por tanto, \(T_y \) es igual a \(T \), y \(a_y \) debe ser igual a cero (ya que la aceleración del capitán es cero). Entonces obtenemos
\begin{equation}
{(T)} \, \hat{\textbf{j}} – W \, \hat{\textbf{j}} = 0 \, \hat{\textbf{j}}
\end{equation}
Usando el hecho de que \(W = m_s g \), reordenando los términos y enfocándonos solo en las magnitudes, obtenemos
\begin{equation}
T ={(m_s g)}.
\end{equation}
Podemos usar este resultado en la ecuación \eqref{RescueBoat_tensionDespejada}. Obtenemos que
\begin{equation}
{(m_s g)} = fr_{{max}} \cos \theta + N \sin \theta.
\end{equation}
A partir de esto, finalmente podemos usar la ecuación \eqref{RescueBoat_friccion} para obtener
\begin{equation}
m_s g = {(\mu N)} \cos \theta + N \sin \theta,
\end{equation}
y reescribimos esta ecuación como
\begin{equation}
m_s g = (\mu \cos \theta + \sin \theta)N,
\end{equation}
para obtener una expresión para la fuerza normal
\begin{equation}
\label{RescueBoat_normalParaReemplazar}
N = \frac{m_s g}{\mu \cos \theta + \sin \theta}.
\end{equation}
La única variable que aún no conocemos en esta ecuación es \(N \). Para encontrarla, considere las ecuaciones a lo largo de Y sobre el capitán. Como mostramos en el diagrama, hay tres fuerzas: la componente Y de N, la componente Y de \(fr_{max} \) y el peso:
\begin{equation}
N_y \, \hat{\textbf{j}} – fr_{max_{y}} \, \hat{\textbf{j}} – W_c \, \hat{\textbf{j}} = m a_y \, \hat{\textbf{j}}.
\end{equation}
Pero el capitán no acelera, por lo que \(a_y \) es cero. Además, el peso viene dado por \(m_c g \), por lo que obtenemos
\begin{equation}
N_y \, \hat{\textbf{j}} – fr_{max_{y}} \, \hat{\textbf{j}} – {(m_c g)} \, \hat{\textbf{j}} = 0 \, \hat{\textbf{j}}.
\end{equation}
Si reorganizamos los términos y nos centramos en las magnitudes, obtenemos
\begin{equation}
N_y = fr_{max_{y}} + m_c g.
\end{equation}
Ahora, observe en el diagrama de cuerpo libre que \(N_y = N \cos \theta \) y \(fr_ {max_{y} } = fr_{max} \sin \theta \). Por lo tanto, obtenemos
\begin{equation}
{(N \cos \theta)} – {(fr_{max} \sin \theta)} = m_c g.
\end{equation}
Podemos usar la ecuación \eqref{RescueBoat_friccion} de nuevo para obtener
\begin{equation}
N \cos \theta – {(\mu N)} \sin \theta = m_c g,
\end{equation}
y factorizar la fuerza normal \(N \) para obtener
\begin{equation}
N (\cos \theta – \mu \sin \theta) = m_c g.
\end{equation}
Finalmente, podemos usar esto en la ecuación \eqref{RescueBoat_normalParaReemplazar} para obtener
\begin{equation}
{\left( \frac{m_s g}{\mu \cos \theta + \sin \theta} \right)}(\cos \theta – \mu \sin \theta) = m_c g.
\end{equation}
Entonces podemos multiplicar por \((\mu \cos \theta + \sin \theta) \) en ambos lados:
\begin{equation}
(m_s g) (\cos \theta – \mu \sin \theta) = (m_c g) (\mu \cos \theta + \sin \theta).
\end{equation}
Si distribuimos esos factores, obtenemos
\begin{equation}
m_s g \cos \theta – m_s g \mu \sin \theta = m_c g \mu \cos \theta + m_c g \sin \theta,
\end{equation}
donde podemos cancelar la gravedad \(g \) ya que se encuentra en todos los términos. Si reorganizamos y factorizamos \(\mu \), obtenemos
\begin{equation}
m_s \cos \theta – m_c \sin \theta = \mu (m_c \cos \theta + m_s \sin \theta ).
\end{equation}
Si dividimos por \((m_c \cos \theta + m_s \sin \theta) \) en ambos lados, finalmente podemos obtener una expresión para \(\mu \):
\begin{equation}
\frac{m_s \cos \theta – m_c \sin \theta}{m_c \cos \theta + m_s \sin \theta} = \mu
\end{equation}
Insertemos los valores numéricos aquí:
\begin{equation}
\mu = \frac{(70\,\text{kg}) \cos (10^\circ) – (55\,\text{kg}) \sin (10^\circ)}{(55\,\text{kg}) \cos (10^\circ) + (70\,\text{kg}) \sin (10^\circ)},
\end{equation}
para obtener
\begin{equation}
\mu = 0.895.
\end{equation}
[/mepr-show]
You need to be registered and logged in to take this quiz. Log in

Leave A Comment