
Min is playing darts while standing 2.5 m away from the board. She throws the dart horizontally at first, and the dart lands 10 cm below the center of the board. After missing the mark, she changes her angle of attack on the next throw, and makes a perfect bullseye.
(a) Calculate the initial speed of the first dart, assuming that its initial height and the height from the floor to the center of the board are the same.
(b) Calculate the angle that she used in order to make the perfect throw on the second dart. If there is more than one answer, explain if both values are realistic.
a) You don’t know the amount of time that the dart was flying! Try to find the time from the equation of motion along X and replace it in the equation of motion along Y.
b) In the previous numeral, you got an equation as a function of the angle, the positions, and the initial speed. So, use the same equation, but this time try to find \( \theta\). You have to use the quadratic equation!
a) For an object with constant velocity, the equation of motion along the x axis is is:
\begin{equation*}
x_f=x_{i}+v_{ix}t,
\end{equation*}
where \(v_{ix} = v_i \cos \theta \). Then, solving for \(t\):
\begin{equation*}
t=\frac{x_f-x_i}{v_i\cos(\theta)},
\end{equation*}
and the equation of motion along the Y axis is:
\begin{equation*}
y_f=y_i+v_{iy}t-\frac{1}{2}gt^2,
\end{equation*}
where \(v_{iy} = v_i \sin \theta \). Now, taking \(x_i=y_i=0\) and using the variable time \(t\) found before and after using some algebra, the previous equation is simplified to:
\begin{equation*}
y_f=x_f\tan(\theta)-\frac{gx_f^2\sec^2(\theta)}{2v_i^2}.
\end{equation*}
Solving for \(v_i\), we get:
\begin{equation*}
v_i=17.5\,\text{m/s}.
\end{equation*}
b) Considering \(y_f=0\), we can use the following equation that we obtained before:
\begin{equation*}
0=x_f\tan(\theta)-\frac{gx_f^2\sec^2(\theta)}{2v_i^2},
\end{equation*}
where now the variable \(\theta\) is the unknown variable. If we rearrange the terms, we can identify the constants \(a,b,c\) of the quadratic equation:
\begin{equation*}
\left(-\frac{gx_f^2}{2v_i^2}\right)\tan^2(\theta)+x_f\tan(\theta)+\left(-\frac{gx_f^2}{2v_i^2}\right)=0.
\end{equation*}
Solving for \(\tan \theta\), and after taking the arc-tangent for both answers, we obtain the final result, namely,
\begin{equation*}
\theta=\arctan(0.023)\approx 1.33^{\circ},
\end{equation*}
and
\begin{equation*}
\theta=\arctan(1.405)\approx 54.56^{\circ}.
\end{equation*}
Both trajectories hit the center of the board. Both answers are correct, and both are realistic because it’s easy to throw the dart almost horizontally, and also easy to throw at a 54 degrees angle!
For a more detailed explanation of any of these steps, click on “Detailed Solution”.
(a) We need to calculate the initial speed of the dart. In order to solve both parts of this problem, we have to write the equations for parabolic motion. Recall that in this kind of motion, the object has constant gravitational acceleration along Y and constant velocity along X.
For an object with constant velocity, the equation of motion is
\begin{equation}
\vec{x}_f=\vec{x}_{i}+\vec{v}_{ix}t,
\end{equation}
where \(\vec{v}_{ix}\) is the velocity along X, \(t\) the time, \(\vec{x}_f\) the final position, and \(\vec{x}_{i}\) the initial position. It’ll also help facilitate things if we just assume that the throw is not horizontal in part a) and if we wait until the end of the calculations to set the angle of the throw to zero (which is the condition for a horizontal throw). This is useful because it will help us to derive a result that we can also use for part b). So, let’s choose a convenient coordinate system and assume that the throw marks a given angle \( \theta\) with X, as illustrated in figure 1.

Figure 1: We place the coordinate system at the initial position of the dart, which is at the same height as the center of the board (as the dashed line indicates). We assume that the throw marks a given angle with X, but for part a) we can just set this angle to zero.
According to this system, the velocity along X is positive, and we get
\begin{equation}
x_f\,\hat{\textbf{i}}=x_i\,\hat{\textbf{i}}+v_{ix}t\,\hat{\textbf{i}}.
\end{equation}
Now, from the previous figure, it is clear that \(v_{ix}=v_i \cos \theta \). Hence, we get
\begin{equation}
x_f\,\hat{\textbf{i}}=x_i\,\hat{\textbf{i}}+v_{i}\cos (\theta) t\,\hat{\textbf{i}}.
\end{equation}
Focusing on just the magnitudes, this gives
\begin{equation}
\label{kinemx}
x_f=x_i+v_i (\cos \theta) t.
\end{equation}
In order to find the initial speed from this equation, we need to still find the time, and so we need more equations. So let’s consider what’s happening along Y.
In Y, the dart has constant gravitational acceleration, which is negative according to the system. In part b), there is no initial vertical speed (the dart is thrown horizontally), but as we said earlier, we’ll assume the general case where there is some initial speed along Y and only at the end of our calculations we will use the fact that this speed is zero. Also notice that the initial position is positive according to the system. Hence, the equation of motion along Y is
\begin{equation}
y_f\,\hat{\textbf{j}}=y_i\,\hat{\textbf{j}}+v_i\sin(\theta)t\,\hat{\textbf{j}}-\frac{1}{2}gt^2\,\hat{\textbf{j}}.
\end{equation}
Focusing on just the magnitudes, we get
\begin{equation}
\label{kinemy}
y_f=y_i+v_i\sin(\theta)t-\frac{1}{2}gt^2,
\end{equation}
where \(y_i\) and \(y_f\) are the initial and final positions along the Y axis respectively. So, we have two equations that involve time. Solving for the time \(t\) in equation \eqref{kinemx}, we have
\begin{equation}
v_i\cos(\theta) t=x_f-x_i,
\end{equation}
which is the same as
\begin{equation}
t=\frac{x_f-x_i}{v_i\cos(\theta)}.
\end{equation}
Using this expression for time in equation \eqref{kinemy}, we obtain
\begin{equation}
y_f=y_i+v_i\sin(\theta)\left(\frac{x_f-x_i}{v_i\cos(\theta)}\right)-\frac{1}{2}g\left(\frac{x_f-x_i}{v_i\cos(\theta)}\right)^2.
\end{equation}
This simplifies to
\begin{equation}
\label{traj}
y_f=y_i+(x_f-x_i)\tan(\theta)-\frac{1}{2}g\frac{(x_f-x_i)^2\sec^2(\theta)}{v_i^2},
\end{equation}
where we have used the trigonometric identities \(\sin(\theta)/\cos(\theta)=\tan(\theta)\) and \(1/\cos^2(\theta)=\sec^2(\theta)\).
Now, since we placed the origin of our coordinate system on Min’s hand as she throws the dart, \(x_i=y_i=0\), and thus equation \eqref{traj} is simplified to
\begin{equation}
\label{trajectory}
y_f=x_f\tan(\theta)-\frac{gx_f^2\sec^2(\theta)}{2v_i^2}.
\end{equation}
We can use this equation to solve for the dart’s initial speed \(v_i\). For the first throw, the dart goes horizontally, and so the initial angle is zero, as shown in figure 2.

Figure 2: Coordinate system for the darts.
Hence, \eqref{trajectory} becomes
\begin{equation}
y_f=x_f\tan(0^{\circ})-\frac{gx_f^2\sec^2(0^{\circ})}{2v_i^2},
\end{equation}
or equivalently,
\begin{equation}
\label{above1}
y_f=-\frac{gx_f^2}{2v_i^2}.
\end{equation}
We know that in the first throw, the dart travels a distance along the X axis of \(x_f=2.5\,\text{cm}\) and lands at \(y_f=-10\,\text{cm}=-0.10\,\text{m}\), which is negative because it’s below our coordinate system. So, we have everything that we need to solve for \(v_i\) in equation \eqref{above1}.
First, divide by \( y_f\) on both sides and multiply by \( v_i^2\), to get
\begin{equation}
v_i^2=-\frac{gx_f^2}{2y_f}.
\end{equation}
After taking the square-root on both sides and using the positive root (since \(v_i\) is the magnitude of the velocity, so is always positive), we obtain
\begin{equation}
v_i=\sqrt{-\frac{gx_f^2}{2y_f}}.
\end{equation}
Using the numerical values, we get
\begin{equation}
v_i=\sqrt{-\frac{(9.8\,\text{m/s}^2)(2.5\,\text{m})^2}{2(-0.10\,\text{m})}},
\end{equation}
which is
\begin{equation}
v_i=17.5\,\text{m/s}.
\end{equation}
(b) To calculate the angle of the second throw, we must go back to equation \eqref{trajectory} and take \(y_f=0\) because the center of the board is the same as the initial height, which, according to our coordinate system, is zero. We can then write
\begin{equation}
0=x_f\tan(\theta)-\frac{gx_f^2\sec^2 (\theta)}{2v_i^2}.
\end{equation}
Using the trigonometric identity \(\sec^2{\theta}=1+\tan^2(\theta)\) in this equation, we get
\begin{equation}
0=x_f\tan(\theta)-\frac{gx_f^2(1+\tan^2(\theta))}{2v_i^2},
\end{equation}
where we now have a quadratic equation for \(\tan(\theta)\). Let’s rearrange some terms in the equation above so that we can see this quadratic equation more clearly. Let’s expand the term in parenthesis to get
\begin{equation}
x_f\tan(\theta)-\frac{gx_f^2}{2v_i^2}-\frac{gx_f^2}{2v_i^2}\tan^2(\theta)=0.
\end{equation}
If we rearrange the terms and identify the constants \(a,b,c\) of the quadratic equation, we get
\begin{equation}
\left(-\frac{gx_f^2}{2v_i^2}\right)\tan^2(\theta)+x_f\tan(\theta)+\left(-\frac{gx_f^2}{2v_i^2}\right)=0,
\end{equation}
or, equivalently,
\begin{equation}
a\tan^2(\theta)+b\tan(\theta)+c=0.
\end{equation}
The solutions to this quadratic equation are
\begin{equation}
\tan(\theta)=\frac{-b\pm\sqrt{b^2-4ac}}{2a}.
\end{equation}
After using the explicit expressions for \(a,b\) and \(c\), this becomes
\begin{equation}
\tan(\theta)=\frac{-x_f\pm\sqrt{x_f^2-4\left(\frac{gx_f^2}{2v_i^2}\right)^2}}{2\left(-\frac{gx_f^2}{2v_i^2}\right)}.
\end{equation}
Let’s plug in the numerical values to get
\begin{equation}
\tan(\theta)=\frac{-(2.5\,\text{m})\pm\sqrt{(2.5\,\text{m})^2-4\left(\frac{(9.8\,\text{m/s}^2)(2.5\,\text{m})^2}{2(17.5\,\text{m/s})^2}\right)}}{2\left(-\frac{(9.8\,\text{m/s}^2)(2.5\,\text{m})^2}{2(17.5\,\text{m/s})^2}\right)}.
\end{equation}
This gives us two solutions:
\begin{equation}
\tan(\theta)\approx 0.023
\end{equation}
and
\begin{equation}
\tan(\theta)\approx 1.405.
\end{equation}
After taking the arc-tangent for both answers, we obtain our final result, namely,
\begin{equation}
\theta=\arctan(0.023)\approx 1.33^{\circ},
\end{equation}
and
\begin{equation}
\theta=\arctan(1.405)\approx 54.56^{\circ}.
\end{equation}

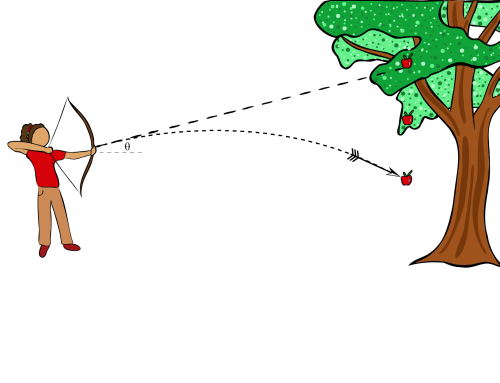
Figure 3: The dashed lines represent two possible trajectories for the dart such that it hits the center of the board. Both trajectories have the same initial speed but different angles with respect to the X axis.
In figure 3, we can see that both trajectories hit the center of the board. Both answers are correct, and both are realistic because it’s easy to throw the dart almost horizontally and at a 54 degrees angle!


Leave A Comment